Amphos 21 is organizing an online iCP Training course on 11-14th November 2024.
Latest
Latest Amphos 21 TechLabs News

 Barcelona Science and Amphos 21 are thrilled to announce an exclusive 1.5-hour course on GibbsStudio.
Barcelona Science and Amphos 21 are thrilled to announce an exclusive 1.5-hour course on GibbsStudio.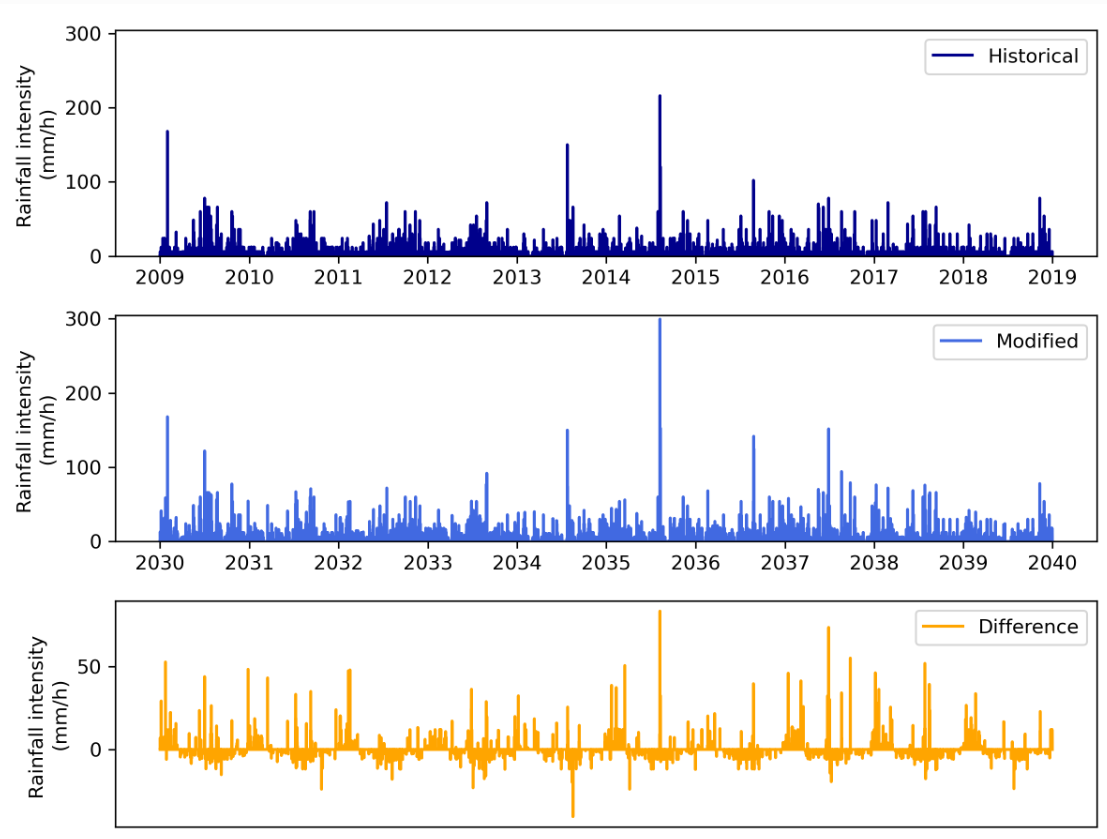
- Published on
Climate Change’s impact on rainfall timeseries
One of the major expected effects of climate change is the variation in precipitation patterns
- Published on
Climate Change Risk Register
Climate risk register is a powerful tool to detect potential economic and operational consequences We are happy to announce the release of iCP 2.1.
We are happy to announce the release of iCP 2.1. After its public release in 2014 and further updates in 2015, 2018 and 2021, a new database version (11a) is now available on-line.
After its public release in 2014 and further updates in 2015, 2018 and 2021, a new database version (11a) is now available on-line. Amphos 21 is organizing an online iCP Training course on 8-10th November 2022.
Amphos 21 is organizing an online iCP Training course on 8-10th November 2022. Knowledge management has increased its importance during the last years. It is crucial to transfer knowledge to newcomers at the radioactive waste management sector, students and young generations.
Knowledge management has increased its importance during the last years. It is crucial to transfer knowledge to newcomers at the radioactive waste management sector, students and young generations.